

The above image of a Martian rock illuminated by white-light LEDs (light emitting diodes) is part of the first set of nighttime images taken by the Mars Hand Lens Imager (MAHLI) camera at the end of the robotic arm of NASA's Mars rover Curiosity. MAHLI took the images on Jan. 23, 2013 (PST), after dark on the 165th Martian day, or sol, of the rover's work on Mars.
This rock target in the "Yellowknife Bay" area of Mars' Gale Crater is called "Sayunei." The image covers an area about 1.3 inches by 1 inch (3.4 by 2.5 centimeters). This allowed surface features to cast shadows and provide textural detail.

The photo above shows a drill hole made by Curiosity. Scientists in this case were testing the drilling process. More scientific tests are scheduled.

This set of images from Mars shows the handiwork of different tools on three
missions to the surface of Mars. The action of each of the tools has sometimes
been referred to as drilling, but the functions of the tools have been different
for each mission.
On the left is a rock on which NASA's Mars Exploration Rover Opportunity used the rock abrasion tool on the rover's robotic arm. Opportunity and its twin, Spirit, were each equipped with one of these tools to grind away the surface layer of rocks and expose interior rock material to examination, in place, by instruments on the rover. The diameter of the abraded circle is 1.8 inches (4.5 centimeters) in diameter. The image was cropped from an image taken in June 2004.
On the left is a rock on which NASA's Mars Exploration Rover Opportunity used the rock abrasion tool on the rover's robotic arm. Opportunity and its twin, Spirit, were each equipped with one of these tools to grind away the surface layer of rocks and expose interior rock material to examination, in place, by instruments on the rover. The diameter of the abraded circle is 1.8 inches (4.5 centimeters) in diameter. The image was cropped from an image taken in June 2004.
The middle image shows a grid of shallow holes cut into icy soil by NASA's Phoenix Mars Lander using the motorized rasp on the back of the scoop on the lander's robotic arm. Phoenix used the rasp to penetrate frozen soil too hard for just scraping with the front-edge blade of the scoop. Soil shavings generated by the rasp were picked up by the scoop for delivery into the lander's analytical instruments. The grid of rasped holes visible in this image, four holes across, is about 2 inches (5 centimeters) wide. The image was taken in July 2008.
On the right is the hole produced by the drill on NASA's Mars rover Curiosity during the first drilling into a rock on Mars to collect a sample from inside the rock. The diameter of the hole is 0.63 inch (1.6 centimeters). The image was taken Feb. 8, 2013.

Here is what the drilling equipment looks like.

This image from NASA's Curiosity rover shows the first sample of powdered rock extracted by the rover's drill. The image was taken after the sample was transferred from the drill to the rover's scoop. In planned subsequent steps, the sample will be sieved, and portions of it delivered to the Chemistry and Mineralogy instrument and the Sample Analysis at Mars instrument. It will take days and weeks for the scientific equipment on Curiosity to analyze this first ever sample drilled from the inside of a Martian rock.
The scoop is 1.8 inches (4.5 centimeters) wide.

It took years to develop the drilling system. Shown above are rock samples showing the practice drilling holes.
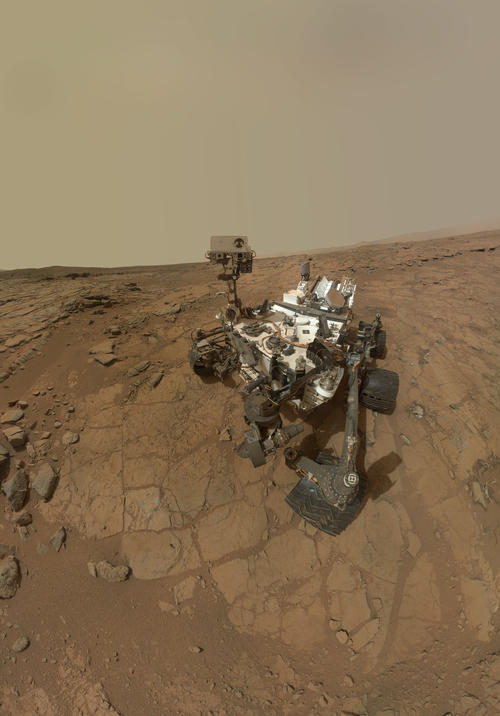
Here is a self portrait taken by Curiosity cameras.
CREDITS:
NASA/JPL-Caltech/MSSS
NASA/JPL-Caltech/Cornell Univ./Univ. of Arizona/MSSS
No comments:
Post a Comment